Should You Fly Your L1 Lidar Missions at Night?

As drone-based Lidar becomes more cost-effective and thus more mainstream, we are seeing more and more Surveyors turn towards the technology to improve their data collection workflows. Of the many Lidar sensors out there, the M300RTK platform coupled with the Zenmuse L1 is the most reliable, good-enough-for-most, solution out there. Of the many use cases for Lidar, there are two in particular that are most common in surveying; topographic mapping under vegetation, and powerline mapping.
In most cases, it makes more sense to fly any sensor during the daytime. However, lidar presents some unique advantages in that it can still collect high quality data at night. There are some circumstances in which it is better to fly a lidar sensor at night, however it really depends on a lot of factors. In this article, we will discuss the tradeoffs that come with flying an L1 at night, and when you should or shouldn’t do it.
L1 Sensor Technology (Background)
In an effort to further optimize reliable data collection with the Zenmuse L1 and after some less than desirable powerline mapping results, we dug deeper into the technology of the L1 sensor. Our goal was to better understand what environmental conditions and sensor settings might produce a more valuable overall result.
Inside of the DJI L1 payload is a Livox Avia Lidar sensor. The Livox Avia uses a 905nm wavelength laser to measure distances. While this wavelength is invisible to the human eye, it is well within the wavelength produced by our Sun. This made us think that by flying without the Sun’s interference, we would get less noisy, higher quality Lidar data.

Outside of environmental factors, we also looked at the sensor settings themselves. The L1 has multiple different payload settings that can be manipulated that meaningfully impact the quality of your Lidar data, and the settings differ depending on your use case. The three settings that can be manipulated are as follows.
Return Mode
This setting decides the number of “returns” that will be recorded for every laser pulse. There are 3 different settings delineated by the number of returns recorded. When mapping in vegetation, the more returns a sensor records, the better it should be at penetrating vegetation. However, fewer returns can occasionally produce stronger and higher quality returns depending on the lidar sensor used. The L1 sensor supports single, dual, or triple return options. Single means that the sensor records the first return of the laser, and therefore only the first surface the beam encounters. Dual and triple returns will include respectively the second, and third returns of the laser pulse.
Sample Rate
The sample rate ranges from 160kHZ to 240kHZ depending on your return mode setting. This is essentially a measure of how much data the sensor will record over any given period of time. As you increase the number of returns the maximum selectable sample rate decreases due to the limitations of the sensor. At triple return, the max sample rate option is 160kHZ, while at single and dual return, the max sample rate option is 240kHZ. With a fixed sample rate, flying faster or slower will decrease, or increase your final point density on the ground.
Scanning Mode
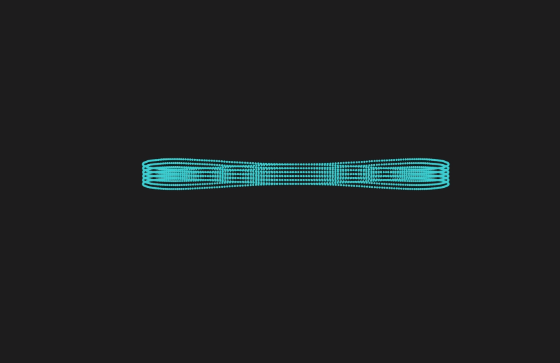
This setting sets the scan pattern of the laser itself. There are two options, repetitive, and non-repetitive.
Repetitive scanning, as the name suggests, has a scan pattern that repeats continuously back and forth as the drone moves over the project area.
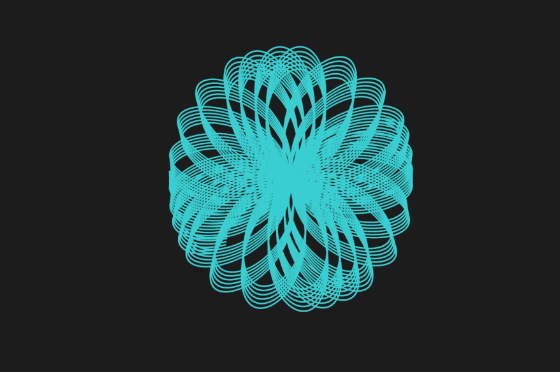
Non-repetitive scanning, in contrast, randomizes this scan pattern of the laser itself over the subject area, creating a flower-like pattern.
Tests
To test all of the different permutations of settings and how they would work, we ran a series of tests. All the test flights were flown over the same mostly urban environment, with significant amounts of powerlines and vegetation to serve as the primary focus of the tests. Further, all tests were flown at the same flight altitude (300’ agl) and flight speed (15mph) with a single lawnmower style flight path with 65% side overlap.
The variables that were changes across flights were:
Time of Day (day/night)
Return Mode (single / triple)
Direction of Flight Lines (north-south / east-west)
Scanning Mode (repetitive / non-repetitive)
Our first set of tests was designed to determine whether sunlight interfered with data quality of the L1. We flew multiple flights at peak solar intensity during mid-day, as well as contrasting identical flights an hour or more after the end of civil twilight to test for any meaningful difference in data quality.
Our next set of tests was designed to determine whether single return or triple return produced better data, observing powerline representation in the point cloud and vegetation penetration in the point cloud respectively.
Another set of tests was designed as a result of the first two tests, to determine whether flight line direction relative to the powerlines themselves (perpendicular vs. parallel) impacted the detection of relatively thin powerlines. There were east/west as well as north/south powerlines on the test site and the test site was flown in both directions.
Our final Independent variable to test was the scan mode. We flew the same test site with both repetitive, and non-repetitive scan patterns, all other parameters being identical.
Results
Lighting Condition - Mid-day vs. Night

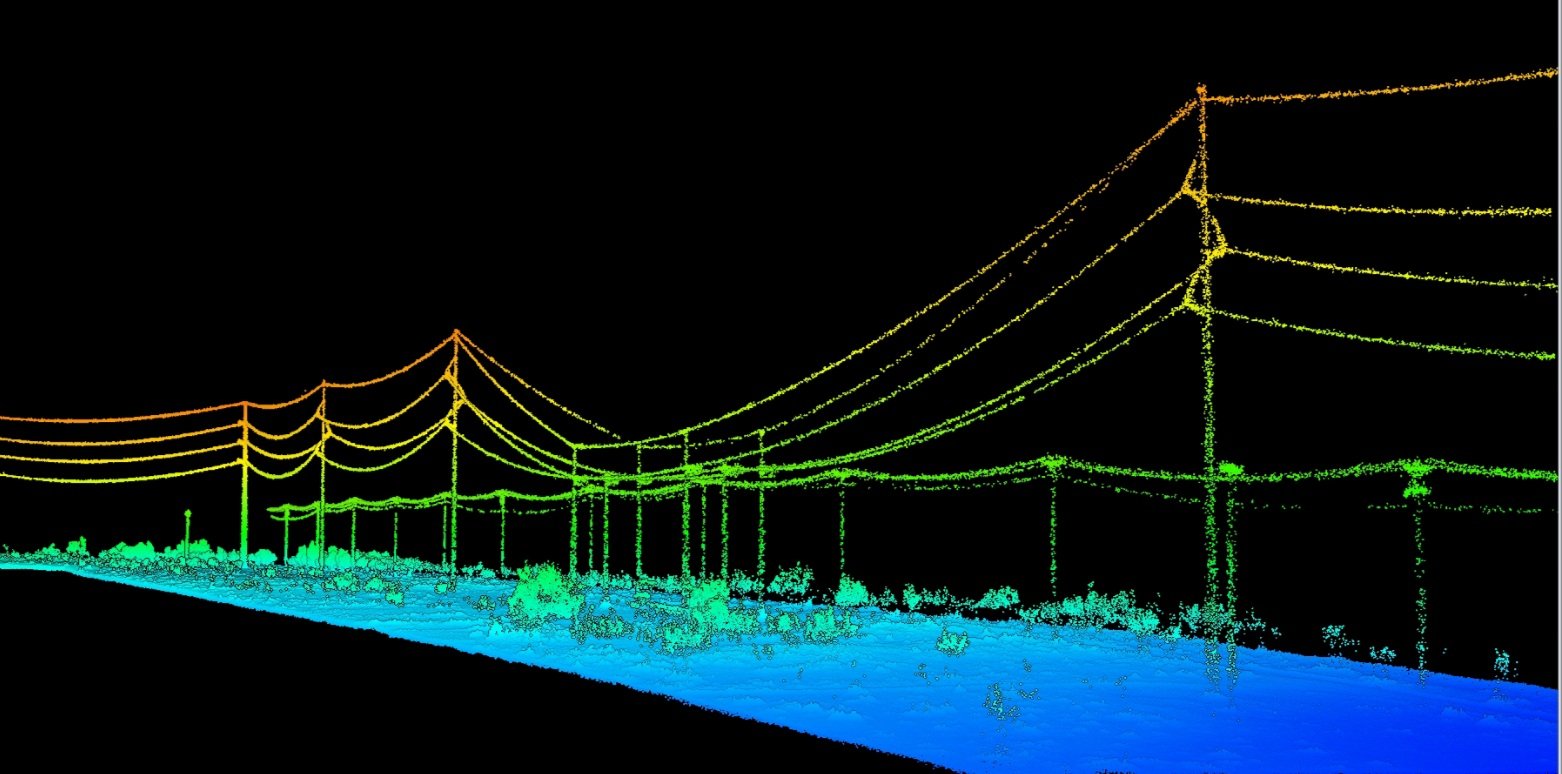
Flying the L1 at night made a noticeable difference in data quality. We found that the flights flown at night were meaningfully better than the flights flown at mid day when it came to detecting the power lines themselves. The quality of the data on the ground was not noticeably impacted, however the quality of the powerlines was much better. There were many of the smaller power lines that were not picked up by the lidar sensor in the daytime flight, that were clearly visible in the nighttime flight.
This is likely because during the daytime flights, the lidar sensor was able to detect a significant amount of noise from the reflections of sunlight that the system had to discard as noise. At night, because there was no other interference in that spectrum, the system could detect even extremely faint reflections of the lidar beam on the power lines themselves.
Return Mode - Single vs. Triple
As expected, triple return is better than a single return as far as data quality is concerned. As mentioned above, triple return allows the third data point the laser impacts to be recorded. As you can see in the example below, triple return equates to better vegetation penetration.
Flight Line Direction Relative to Powerline Direction
We found that flying parallel to the direction of the powerlines improves the amount of data points we are able to record on the lines as compared to flying perpendicularly to the power lines. Both north and south, as well as east and west flights flown at night supported this result, as power lines that were along the direction of travel returned higher quality results.
Scan Mode - Repetitive vs. Non Repetitive
Non repetitive scanning performs slightly better for vegetation penetration, but when it comes to powerline data extraction, repetitive scanning produced about 25% more data points on power lines than non-repetitive scanning did. It comes down to site conditions for which scan mode is optimal, as a site focused on topographic mapping of vegetation will want a non repetitive scanning mode, and flights focusing on power lines will prefer a repetitive scan mode.
Downsides to Night Flying
Flying lidar at night does improve the quality of the lidar result. However, there are two few critical downsides to flying missions at night.
The first, and probably most significant, is the lack of any imagery or color data to provide context to the site. When flying at night, the camera is unable to get any useable data at all, and the lidar sensor can only gather an uncolored point cloud. As such, you have no ability to discern features by color or imagery. For some missions this might be OK, but generally, having imagery helps to provide any user down the line with context as to what they are actually seeing.
Second are the operational complexities created by night flights. Not only do you need to follow all the regulatory requirements of flying at night, but often flying outside of normal business hours is more challenging for any sort of commercial project. It can also make it more difficult to look for any potential safety risks, such as trees or powerlines that might be within the flight area.
The good news is, the M300RTK is equipped to remain Part 107 compliant at night. It has directional navigational lights on each arm, and a surprisingly powerful strobe beacon on the top and bottom of the aircraft called the “navigation LED”. The drone also has automatic auxiliary takeoff and landing LEDs that illuminate the entire area under and even above the drone on takeoff and landing in low light. In order to fly under the new Part 107 regulations for flight at night, verify that you have completed an initial knowledge test or training, as applicable, under § 107.65 after April 6, 2021 when the new rules were published.
Tips for Safe Night Operation
Flying a drone at night can be a bit scary at first, but with the proper procedures, it is completely safe to do so. Here are some operational tips for flying at night:
When possible, you should inspect your site and identify your takeoff / landing area during daylight hours to ensure you have a full understanding of the area.
Let your eyes adjust to the dark. Avoid bright white flashlights or headlamps; instead, use red light when possible to see at night as needed, and turn your controller display brightness down as far as possible
Turn on your M300’s Navigational LED right after takeoff (map this to the C1 or C2 button of your controller for easy toggle)
Your drones obstacle avoidance system relies on light to work, so it will be mostly inoperable, take care when operating in proximity of other objects at night.
Should you Fly your L1 Missions at Night?
So should you fly Lidar missions at night? While the L1 is perfectly capable of gathering quality data at night, we would generally only recommend night flights for missions in which you are mapping particularly thin or hard to see powerlines.
For most missions, the need for imagery and color data outweighs the need to precisely map the smaller power lines in a project. And even when there are smaller powerlines, flying lower is a better option than having to fly at night without imagery. However, for projects that have a combination of high elevation transmission lines with distribution lines running beneath them, it could definitely be better to fly a project at night.
Topographic Missions - Recommended Settings
When flying a mission specifically for topo mapping underneath vegetation, flying at night does not give a material improvement over the daytime. As such, we would generally recommend daytime flights for topographic mapping, as the addition of color and imagery data would make the final data much more usable.

Recommended Settings:
Time of day - Daylight Preferred
Flight Altitude - 200’ - 300’
Return Mode - Triple
Sample Rate - Maximum Allowable
Scan Pattern - Non - Repetitive
Powerline Mapping - Recommended Settings
L1 Missions with the sole purpose of powerline extraction should consider night flights, especially if there are a high quantity of smaller power distribution lines. Sometimes, you might only discover this after flying a site once and realizing that it did not capture all the necessary power lines. In these cases, you should consider flying at night, flying as low as practical, and flying parallel to the power lines you are trying to map.

Recommended Settings:
Time of day - Consider Night
Flight Pattern - Parallel to Powerlines
Flight Altitude - 75’ above your highest obstacle/subject on the site
Return Mode - Triple
Sample Rate - Maximum Allowable
Scan Pattern - Repetitive
Summary
The DJI L1 is fully capable of gathering great lidar data at night, and for powerline mapping, the lidar data itself is even slightly better. However, this does not mean flying at night is the right decision for every flight. It depends on the specific needs of each individual project. If you want help planning your mission, or are interested in learning more about how Aerotas might be able to help you get the most out of your drone, then please reach out to us below.